 设计,通过系统理论分析与计算给出硬件设计电路及设计程序。该控制系统通过单片机接收角度传感器SCA60C和红外测距传感器发来的信号来控制电机的正反转,进一步控制与电机相联的导轨上下运动,从而使小球在导轨上按要求灵活滚动或定位。
设计,通过系统理论分析与计算给出硬件设计电路及设计程序。该控制系统通过单片机接收角度传感器SCA60C和红外测距传感器发来的信号来控制电机的正反转,进一步控制与电机相联的导轨上下运动,从而使小球在导轨上按要求灵活滚动或定位。
关键词:STC89C52;SCA60C;步进电机;红外测距传感器
中图分类号:TP273 文献标识码:A 文章编号:1009-3044(2016)29-0221-04
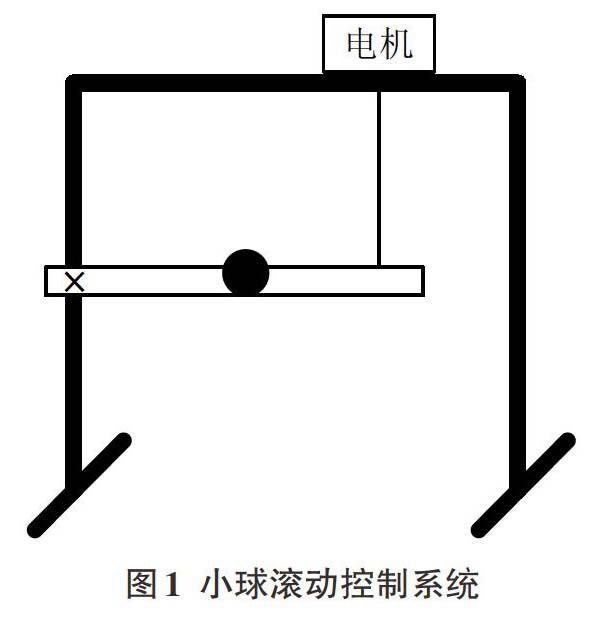
小球滚动控制系统为我院参加电子制作比赛的作品。它采用单片机控制电机的运动,进而控制导轨的一端上下运动,实现导轨中小球的往复运动或停留。本系统具有控制方便、实现简单、抗干扰能力强的优点。其原理框图如图1所示。
1系统方案
1.1系统总体方案设计
本系统由主控制器、键控调节、角度检测、位置检测、电机控制和声光报警等功能模块组成。系统总体框图如图2所示。
1.2主控制器的选择
方案1:采用可编程逻辑器件CPLD,具有并行输入输出方式。它在系统处理的速度上较快,但是規模大、结构复杂,而本系统不需要复杂的逻辑功能,对数据处理速度的要求也不是非常高。
方案2:采用FPGA作为系统的控制器。FPGA可以实现各种复杂的逻辑功能,规模大,密度高。但是因其价格较高使系统成本增加,高速处理优势得不到体现。
方案3:采用STC公司的STC89C52单片机作为主控制器。STC89C52是一种新型的51内核的单片机,它内部包含8KBFLASH ROM和512B RAM,正常工作模式下典型功耗4-7mA,空闲模式下小于2mA,具有32个双向输入/输出I/O口、3个16位定时/计数器和5个两级中断结构。它在操作时简便,对单片机的电源、时钟、复位电路进行特殊处理,避免人为干扰。
从使用的方便及经济性角度考虑,选择方案3。
1.3角度传感器的选择
方案1:采用量角器测量导轨从±15°范围内的任一位置调整至水平状态。它在测量的时候比较直观、简易,但在功能实现上误差大、准确度不够。
方案2:MMA7455是一款数字输出、低功耗、微机械加速器,具有信号调理、低通滤波器的功能,但要得到角度信号,需要三角函数的计算,得出结果存在误差。
方案3:SCA60C单轴倾角传感器,测量范围(±90°),单机5V供电,比例电压输出,模拟0.5-4.5V输出,左右倾斜角度报警范围0-90°、90°-180°全范围可调,调整精度为±1°。它在使用的时候耗能低、精度比较高,便于测量的准确度。
鉴于角度精度的要求,选择方案3。
1.4红外传感器的选择
方案1:采用超声波传感器测距。它是利用超声波的特性进行工作,具有频率高、波长短、绕射现象小,但是它易受干扰、测距精度不高。
方案2:采用光电传感器测距。它的抗干扰性好,测量能力好,特别适用于高精密、小元件的机械设备测量,但是不在密封环境下用容易被污染失效,不利于物体的测量。
方案3:采用红外传感器测距。它是可通过电位器旋钮调节检测距离,有效距离范围2-30cm,工作电压为3.3V-5V,而该传感器具有干扰小、便于装配、使用方便。
为了使用方便、测距精度高,选择方案3。
1.5电机的选择
方案1:采用直流电机,利用直流电机的正反转来控制导轨的升降。它在控制上简便、调速性能好,但是可靠性差、转速快不利于导轨的控制。
方案2:采用舵机来实现功能,其结构紧凑、易于安装、控制简单,但是相应周期必须大于20ms,不利于性能的调试。
方案3:采用步进电机来控制导轨的升降。其特点如下:供电电压24VDC-50VDC,电流1A-4A,它便于自动化控制、定位精度高、转矩波动小,低速运行很平稳。
为了定位的精准度、稳定性,选择方案3。
2系统理论分析与计算
2.1步进电机工作原理
步进电机是一种将电脉冲转换成相应角位移或线位移的电磁机械装置,具有快速启、停能力,可以通过输入脉冲来控制它在一瞬间的启动或停止。它有4条励磁信号引线A,A-,B,B-,通过控制这4条引线上励磁脉冲产生的时刻,即可控制步进电机的转动。每出现一个脉冲信号,步进电机只走一步。因此,只要依序不断送出脉冲信号,步进电机就能实现连续转动。
细分型两相混合式步进电机驱动器HST884A,采用直流16-50V供电,适合驱动电压24V~50V,电流小于4.0A外径42~86毫米的两相混合式步进电机。此驱动器采用交流伺服驱动器的电流环进行细分控制,电机的转矩波动很小,低速运行很平稳,几乎没有振动和噪音。高速时力矩也大大高于其它二相驱动器,定位精度高。
2.2红外传感原理
该传感器模块对环境光线适应能力强,其具有一对红外线发射与接收管,发射管发射出一定频率的红外线,当检测方向遇到障碍物(反射面)时,红外线反射回来被接收管接收,经过比较器电路处理之后,绿色指示灯会亮起,同时信号输出接口输出数字信号(一个低电平信号),可通过电位器旋钮调节检测距距离范围2-30cm,工作电压为3.3V-5V。该传感器的探测距离可以通过电位器调节、具有干扰小、便于装配、使用方便等特点。
本系统采用红外遥控的方式进行流程的操作。
2.3角度测量原理
角度传感器输出0.5-4.5V线性变化的电压,使用A/D进行角度信号采样,输出角度变化的数字量。
导轨旋转每度的电压变化量为Vc=(3.48V-2.68V)/(105°-75°)0.0267伏/度(通过实测当导轨角度为105。时,则电压为3.48V;当导轨角度为75。时,则电压为2.68V)。A/D的分辨率为R=1/2^8=1/256。则导轨旋转角度&与输出实时电压vx和最小分辨率R的关系为:
&=Vx×R/(Ve+2.68)
3硬件电路设计
3.1报警电路的设计
根據题目要求,需在导轨两端设置触发机构,当小球在触碰导轨左右端头时会有明显的声或光指示,所以需用一个报警电路控制来实现该功能,其报警电路如图3所示。
3.2电源电路的设计
设计的电源电路对电机驱动进行供电,实现电机的正常工作,电路如图4所示。
3.3电机控制电路的设计
为控制电机的转速和转动方向,需要步进机和驱动器及单片机之间的连接。步进电机和驱动器需要24-50V的电压驱动。将89C52芯片的P1口与电机相连。电机驱动电路如图5所示。
3.4角度传感器控制电路的设计
为实现15s内使小球在导轨上做3次往复运动,控制范围为5-55cm。由于角度传感器的调节范围为0-180°,所以需将角度传感器90°放置,对应导轨在75°-105°范围内进行调整;用角度传感器进行检测,产生角度检测信号通过单片机驱动电机来控制导轨的运动,当其角度小于90°时电压小于3V,则导轨向上运动;当角度大于90°时电压大于3V,则导轨向下运动,并可以完成在区间5-55cm内的3次往复运动。角度传感器的电路如图6所示。
3.5红外测距传感器控制电路的设计
根据题目要求,小球在25-35cm区间某一位置静止不滚动。通过红外测距传感器来检测小球在导轨中的位置,将信号输入到单片机中(红外遥控也可进行操作,用于实操中演示),通过程序设定控制小球在导轨内的平衡状态,从而使小球能在导轨中静止,达到距离检测和定位的作用。红外测距传感器控制电路如图7所示。
4程序设计
程序设计流程如图8所示。
5测试方案与测试结果
5.1调试方法与仪器
根据本系统的设计要求,制作了小球滚动控制系统。制作完成后,对步进电机、角度传感和红外传感进行了测试。
步进电机的测试采用了PWM脉宽调制技术,通过控制单片机的I/O口来输出占空比不同的方波信号从而实现了对步进电机转速的调节。
角度传感测试采用了YL-90角度传感器模块,该模块输出为模拟电压值,[0 180°对应0.5-4.5V]。导轨以原点为中心运动,角度传感模块感应位置变化,输出信号到单片机从而控制电机。
红外传感测试采用了丰川电子有限公司的红外模块,检测方向遇到小球时,红外线反射回来被接收管接收,经过比较器(LM393)电路处理之后,信号输出低电平到单片机,获取小球方位距离信息,从而控制电机。
5.2测试数据
5.3测试结果分析
测试结果表明,导轨两端触发机构有明显声或光指示;小球在15s内从±15°范围内停在规定的区间25cm-35cm内;小球在规定的区间5cm-55cm内完成3次往复运动,并停在规定的位置,时间符合题目要求。