 设计要求。
设计要求。
关键词: 航空电源; 陀螺仪; DDS; 平均滤波算法; 惯性导航系统
中图分类号: TN86⁃34; TP713 文献标识码: A 文章编号: 1004⁃373X(2016)20⁃0154⁃05
Abstract: The navigation and position are the most important functions of the gyroscope used in military and civil aircrafts. The running condition of the gyroscope can affect the aircrafts’ safety directly, and the multiphase power supply providing the electrical energy for the gyroscope determines whether the gyroscope can work stably. The C8051F020 and DDS chip AD9952 based 1 200 Hz waveform generating circuit of two⁃phase gyroscope power supply is described, in which the high⁃power MOSFET power supply is used to provide the large enough output power for the integrated operational amplifier MP108 circuit. The smooth waveform output is realized with the hardware and software filtering, which can make the gyroscope work smoothly and accurately. The test results show that the output voltage and frequency of the power supply have high accuracy, good stability and great ability to resist the high⁃frequency interference, and can satisfy the design requirements.
Keywords: aviation power supply; gyroscope; DDS; average filtering algorithm; inertial navigation system
0 引 言
陀螺仪作为航空器重要的惯性导航设备的重要组成部分,其精度直接影响着整个惯性导航系统的精度,尤其是在极端温度和气候情况下,仍需保证陀螺仪能平滑顺畅进行工作,故需要系统提供高质量的驱动电源,以保证其工作的稳定性和可靠性[1]。
本文重点介绍了以C8051F020为控制核心,运用DDS技术及新型功率驱动方式搭建航空陀螺仪用1 200 Hz两相高性能驱动电源,在硬件方面通过合理设计基准电源、单片机及显示电路、两相DDS发生电路和大功率MOS驱动电路等,输出频率、电压既可定频、定压输出,也可通过数字编码器进行调节,以及有效的软硬件滤波方法,以实现两相1 200 Hz正弦波形的平滑、稳定、高精度输出,使陀螺仪电机能按既定控制要求精确、稳定输出。
1 系统整体设计
系统由控制核心C8051F020、AD9952组成的DDS发生电路、功率驱动电路、检测电路、数字编码器及LCD显示模块及直流供电电源组成,且电路具有完善的过压、过流及短路报警及保护。同时上位机通过16位高分辨率凌华数据采集卡直接采集电压、电流等四组输出参数,实现数据的实时采集和监控。该电源整体系统框架如图1所示。
1 200 Hz两相驱动电源的设计参数为输出容量>100VA,两相相位差为90°,相位稳定度≤2%,输出两相相电压连续可调(7~15 V),电压稳定度≤1%,频率稳定度≤1%,波形失真度≤2%,输出相电流≥2.5 A,负载稳定度≤1%,为实现电路电压的精度,部分元件采用高精度军品级元器件以保证精度需要。
2 系统硬件设计
2.1 C8051F020端口配置及供电电源设计
C8051F020是美国 Cygnal 公司推出的一种混合信号 SoC 型8位单片机,是集成度很高的混合信号系统级的芯片,系统利用单片机的8~12位A/D转换器及其他端口,实现系统模拟量采集、DDS发生电路、LCM240128ZK图形模块显示等功能,为满足C8051F020的供电及基准电源(VREF=2.5 V)、DDS电路、检测电路等的需要,故电路需设计5 V,1.8 V,3.3 V,
±15 V高精度供电电源,以满足单片机及AD9952的需要,均采用了高质量集成稳压器以及参数合理的LC滤波器[2]。尤其是3.3 V和DC 1.8 V,直接影响到DDS输出信号及检测信号的精度,故在电路中运用了高精度电源转换芯片AMS1117⁃3.3和AMS1117⁃1.8,以保证供电需要,电源C8051F020端口配置及3.3 V直流电源如图2所示。
2.2 DDS电路设计
AD9952是Analog Device公司推出的新一代DDS芯片。是一个具有14位模数转换功能的直接合成器。该新芯片运用先进的直接数字合成技术,内部连接一个可编程的高速度模拟转换器,能够产生一个频率最高达200 MHz的模拟正弦波输出,并且能够提供快速频度跳动和良好的调频分辩率[3⁃7],本设计中通过C8051F020将调频和控制字通过其串行I/O口载入AD9952。同时电路通过仪表放大器AD620完成第一级放大,放大倍数由0.1%的定制精密电阻RS1_38(或RS2_38)决定,按设计要求该级完成总放大倍数的21.213倍,由手册可知AD620放大倍数计算公式为[Au1=1+49.4RS1_38=21.213],可求得RS1_38=RS2_38=2.444 kΩ。
C8051F020通过SPI串行接口给AD9952的控制寄存器写入控制字,在程序中控制电源的幅值、频率与相位差输出。
如频率控制可用公式:[f=Kfs232]实现,本设计信号为输出频率1 200 Hz,外接晶振频率fs=24 MHz,故FTW0的控制字K=0x89,一方面满足波形频率的要求,另一方面也满足高频采样的要求。
两相电压相位差为90°,AD9952相位计算公式为[ϕ=360°×POW214],设定A相初相位为0°,则控制变量POWA=00;而B相相位为90°,则POWB=4 096。
而调节AD9952幅值的16位控制寄存器为ASF,其控制范围为0000H~3FFFH,其对应输出电压为0~0.5 V,A相DDS电路如图3所示。
2.3 功率驱动系统及供电电源设计
如图4所示,由于系统要求输出电流每相≥2.5 A,故给集成运放MP108供电的直流电源输出功率要求较大,一般的晶体管稳压电源已很难满足功率及稳定性要求,本设计中采用了单相双MOS管(IRFP150N)推挽输出方式给信号放大电路提供+VS直流供电电压,同时电源进线采用电抗器L1_1和C1组成单路滤波电路,以消除AC 220 V电源带来的扰动,如图5所示为+VS电源及单相功率驱动电路。
根据设计,由MP108组成的同相比例运算电路的电压放大倍数为[1+RG1_2RG1_3=2],故RG1_2和RG1_3选择精度0.1%的精密军品电阻(1 kΩ)。
2.4 检测电路设计及参数设置
本设计中需要检测两相电压、电流有效值(PHA,PHB,CURRENT1和CURRENT2)经过精密差压放大器AD629以及有效值计算芯片AD536通过AIN0~AIN3四路模拟量输入[8⁃9]。相位差和频率信号通过LM311整形成矩形波后分别通过C8051F020端口T0,T1和T2进行参数检测,采样频率设定为100 kHz。A相测试如图6所示。频率的检测通过1 s内一个周期内统计的A相矩形波个数n来实现,通过C8051F020的CEXn引脚上出现的有效电平变化导致PCA0捕捉PCA0计数器/定时器的值并将其载入对应模块的16位捕捉/比较寄存器(PCA0CPLn和PCA0CPHn),即输出频率f=n。
而相位差的计算是通过A相和B相在一个周期内捕捉上升沿时刻t1和t2,得到Δt=t1-t2,则相位差ΔΦ=f×Δt×360°,如图7(a)、图7(b)所示。
系统在软硬件初步调试后,上位机得到输出波形如图8所示,由图8可知,在输出级和供电电源部分(如图4和图5所示)采用了LC等滤波电路,波形各项参数已初步达到基本要求,抑制了大部分干扰,但由于硬件滤波器有固定的截至频率,还不能完全抑制系统本身和外界的干扰,所以初测波形扰动及高频噪声仍比较明显,故利用软件算法,采用时滞补偿滤波法对波形进一步优化,使输出两相电压进一步达到标准正弦波。
3 系统软件设计
系统程序按模块化设计,共分初始化、数字电位器及按键检测、电压、电流等检测以及滤波算法模块、LCD显示模块驱动子程序,其中根据去时滞补偿平均滤波算法进行软件滤波,用于DDS初始输出波形的信号处理,以进一步改善波形。程序流程图如图9所示。
3.2 时滞补偿平均滤波算法及程序
在系统中首先要保证输出两相电压波形的平滑度,故在电压检测及高频采样过程中采用时滞补偿平均滤波法,由于采样直接来自输出,故取每一个采样值与理想值的差值,采用反向补偿方式,调整下一个时段的输出信号,即tn时段若采样值为[xn′],通过计算时刻的参考值xn=Umsin(ωt+φ)可得差值为Δx=xn-[xn′],则下一时刻实际输出值为yn+1=[xn+1′]+Δx,由于该系统采用100 kHz的采样频率,故补偿虽有一定的时滞性,且该系统选用器件均为高速型器件,信号传输时间短(总时间<Δt),使误差及扰动幅度大大降低,并具有一定的自适应调整功能,如图10为时长[120]个周期的波形变化情况。
3.3 上位机程序设计
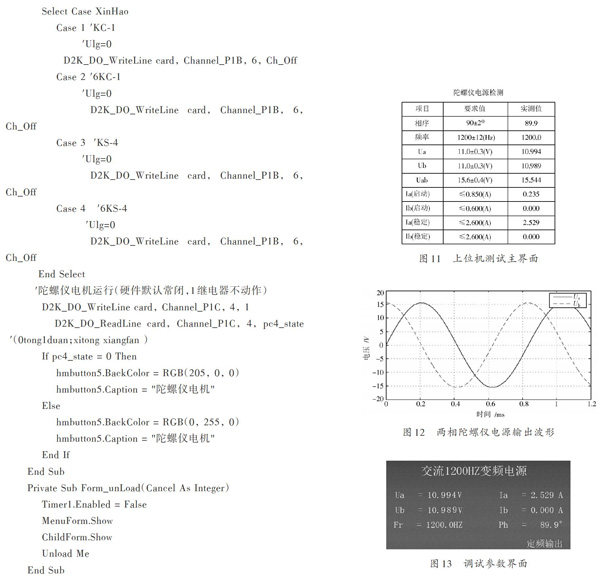
系统上位机通过凌华(PCI⁃6208+6216)数据采集卡采集陀螺仪电源在负载情况下的实时电压和电流参数值,每1 s刷新一次,如图11所示为两相陀螺仪电源参数上位机测试界面。
4 实验与结果分析
通过系统硬件的合理搭建、软硬件滤波方法的合理设计,加载陀螺仪电机负载,通过从常温到低温冻结,以及不同气候情况下,给定电机不同负载,输出电流从0~2.529 A变化的过程中(以设定输出电压11 V为例,并以两相电源空载和满载对比),电压变化量仅为0.005 V,表明两相陀螺仪电源各项参数以及波形分布已完全达到设计要求,其上位机测试界面及波形输出如图11~图13所示。
5 结 论
本文利用直接数字频率合成器(DDS)以及高性能单片机(C8051F020)搭建了两相陀螺仪用1 200 Hz驱动电源,合理布置PCB元件及布线,采取了有效的软硬件抗干扰措施,测试结果表明,该系统电压稳定度、频率稳定度、波形失真度、输出相电流、负载稳定度等参数均满足设计要求,证明了系统设计的正确性、合理性和实用性。
参考文献
[1] 蒋窍,李杰,刘俊,等.基于单片机的GPS/MEMS陀螺仪航向角实时测量系统[J].传感技术学报,2011,24(6):919⁃922.
[2] 高士友,胡学深,杜兴莉,等.基于FPGA的DDS信号发生器设计[J].现代电子技术,2009,32(16):35⁃37.
[3] 李征,刘玮玮.一种基于单片机和DDS技术的信号源设计[J].现代电子技术,2014,37(17):46⁃47.
[4] 牛耕,陈思宇,于继翔.基于DDS技术的正弦交流信号源的设计[J].现代电子技术,2012,35(3):52⁃56.
[5] 査森文,秦开宇,唐博.基于AD9952的直接频率合成设计[J].中国高新技术企业,2010(6):18⁃19.
[6] 王辛.基于DDS技术的波形设计[J].现代电子技术,2013,36(14):1⁃3.
[7] 丁国良,李建新,邵高平.基于DDS技术的井下声波模拟器的实现[J].微计算机信息,2005,21(4):170⁃171.
[8] 杨宁,史仪凯,袁小庆,等.高精度、低功耗带隙基准源及其电流源设计[J].传感技术学报,2014(1):58⁃63.
[9] 杨云飞,葛玉,黄林昊,等.基于自适应IIR滤波的抗干扰DDS系统设计[J].现代电子技术,2013,36(21):86⁃88.